FonctionFonction Compass: la fonction boussole ouverte, 4 canaux (centre du canal de direction), papillons au niveau du sol, l'attitude de vol reviendra à la direction d'attitude lorsque l'alimentation sur les batterys.
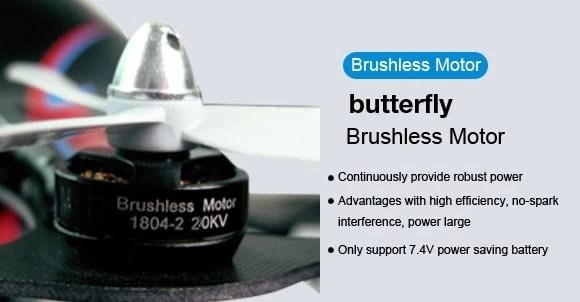
- 7.4V pris en charge ou 11.1V lipo-batterie.
- Aucune soudure supplémentaire
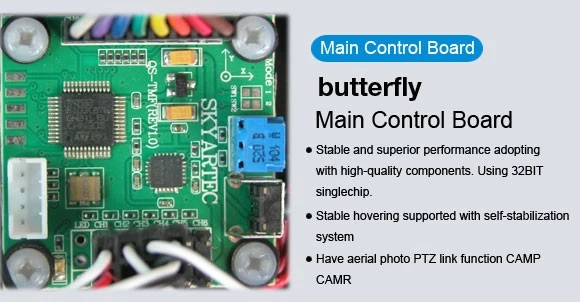
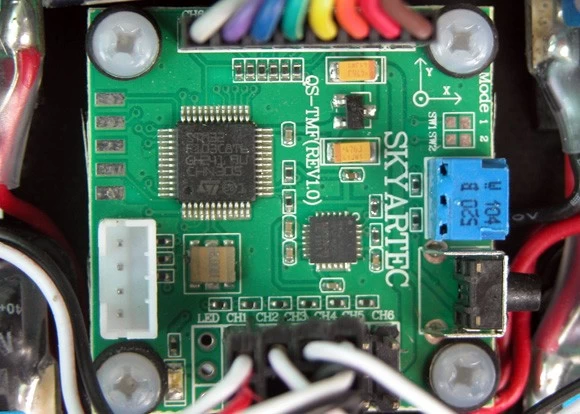
- Adopte excellents composants de qualité, une performance stable et de qualité supérieure. Utilisez un seul morceau 32 bits
- L'intégration de tous les composants, adopte capteur d'accélération à trois axes et trois axes capteur de vitesse angulaire
(6 axes gyroscope)
- Facile à utiliser et à déboguer, applique aux modèles multi-rotor multiples
- 3 Axia Gyro sensibilité et régler la fonction principale peuvent être réglés par la position de réglage
- Support multi-axe de type X
- Ports de sortie ont jusqu'à six groupes, peut conduire ESC ou servo.
- Sortie de signal PWM standard, appuyer ESC PWM classique (Proposer à partir de séries SKYARTEC haut débit ESC) et toutes sortes de servo (numériques ou analogiques)
- Le récepteur peut être connecté directement à la carte de commande de vol, sans un décodeur spécial, ou de modifier
récepteur
- La version actuelle peut atteindre stationnaire stable et une excellente maniabilité (dépend d'une combinaison raisonnable,
la mise en service et l'expérience opérationnelle), le mode de fonctionnement est similaire à l'hélicoptère rc, mais plus facile à adapter
- Peut compléter certaines cascades incroyables compétences de vol, peut également vie de la batterie stable, pour répondre à petite portée aérienne
photo pour remplacer l'hélicoptère rc compliqué et coûteux
- Mise à jour du firmware de soutien (besoin d'acheter programmation), et la performance de l'amélioration incessante
- Le système d'auto-stabilisation, soutien-point fixe stationnaire
- Peut rapidement éliminer l'inertie provoquée par la fuite, rapide et stable.


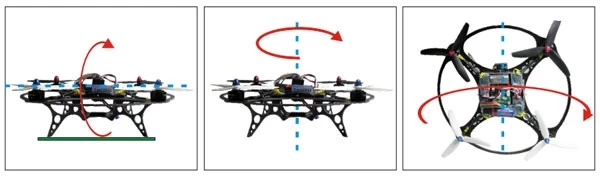
Étalonnage de la boussole
Se il vous plaît étalonnage de la boussole avant le premier vol ou changer une assez loin du lieu d'origine.
Se il vous plaît noter: la précision est de plus ou moins 10 degrés, l'écart de précision est grande, la boussole besoin d'ajuster.
1. Placez les papillons en position horizontale, bloquer le moteur.
2. Gardez appuyant sur le bouton sur le récepteur jusqu'à ce que le flash de lumière, puis relâchez le bouton.
3. Tournez la Papillons 360 degrés selon la avant / arrière, gauche / droite et horizontale orientation de niveau, et tous les tourne sont arrivée dans les 30 secondes, jusqu'à ce que le récepteur ne clignote, les papillons peuvent voler.