FunzioneFunzione Bussola: funzione bussola aperta, 4ch (centro del canale in direzione), farfalle a livello del suolo, l'assetto di volo tornerà alla direzione atteggiamento quando potere sopra i batterys.
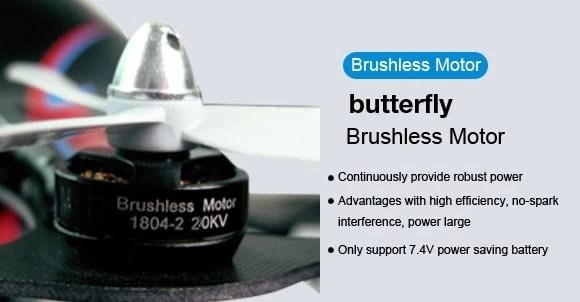
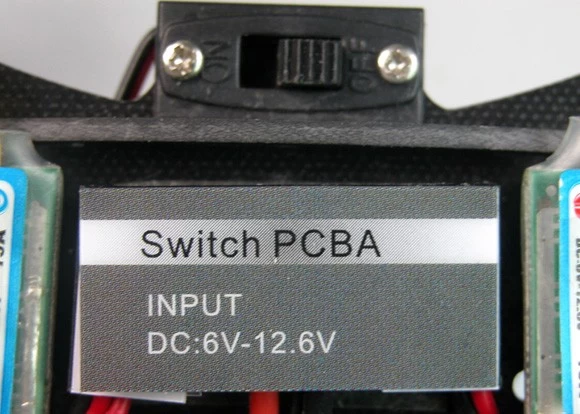
- 7.4V supportati o 11.1V lipo-batteria.
- Nessuna saldatura aggiuntiva
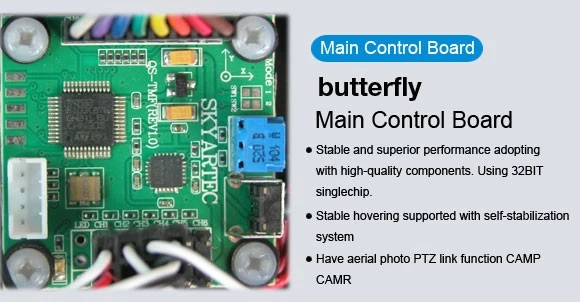
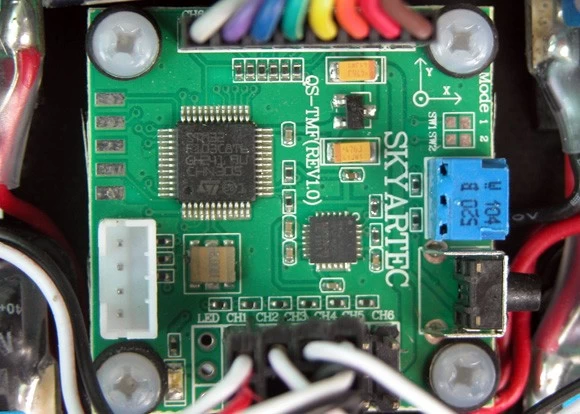
- Adotta componenti di eccellente qualità, prestazioni stabili e superiori. Utilizzare 32 bit monochip
- L'integrazione di tutti i componenti, adotta il sensore di accelerazione a tre assi e tre assi sensore di velocità angolare
(6 assi giroscopio)
- Facile da usare ed eseguire il debug, riguardano i modelli multi-rotore molteplici
- 3 axia sensibilità giroscopio e impostare la funzione principale può essere regolata dal regolatore di posizione
- Supporto per il multi-asse di tipo X
- Le porte di uscita hanno fino a sei gruppi, può guidare ESC o servo.
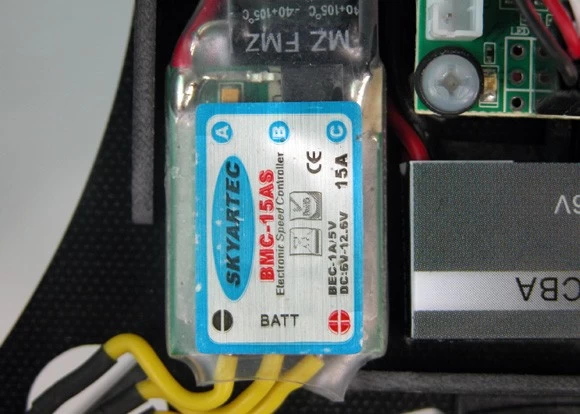
- Uscita del segnale PWM standard, sostenere convenzionale PWM ESC (suggerisca l'uso di serie SKYARTEC ad alta velocità ESC) e tutti i tipi di servo (digitali o analogici)
- Il ricevitore può essere collegato direttamente alla scheda di controllo di volo, senza un decoder speciale, o alterare
ricevitore
- La versione attuale può raggiungere hover stabile e eccellente maneggevolezza (dipende da un mix ragionevole,
messa in servizio e l'esperienza operativa), la modalità di funzionamento è simile a l'elicottero rc, ma più facile adattare
- Impossibile completare qualche prodezza incredibile abilità di volo, anche in grado di vita stabile della batteria, per soddisfare piccolo campo di applicazione aerea
foto di sostituire il complicato e costoso elicottero rc
- Aggiornamento del firmware di supporto (necessità di comprare la programmazione), e le prestazioni miglioramento incessante
- Sistema di auto-stabilizzante, supporto a virgola fissa in bilico
- Può eliminare rapidamente l'inerzia causata dal volo, veloce e stabile.


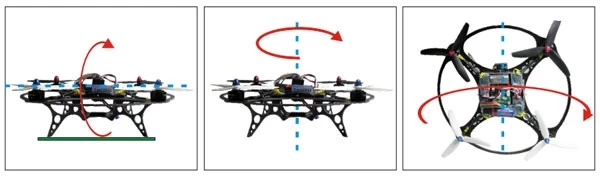
Taratura della bussola
Si prega di calibrazione la bussola prima del primo volo o cambiare un po lontano dal luogo originale.
Si prega di notare: la precisione è di più o meno 10 gradi, la deviazione di precisione è grande, la bussola è necessario regolare.
1. mettere le farfalle in posizione orizzontale, bloccare il motore.
2. Toccare e tenere premuto il pulsante sul ricevitore fino a quando la luce del flash, quindi rilasciare il pulsante.
3. Ruotare la farfalle 360 gradi secondo la avanti / indietro, orientamento livello sinistra / destra e orizzontale, e tutte le ruota sono finitura entro 30 secondi, fino a quando il ricevitore non è il flash, le farfalle possono volare.