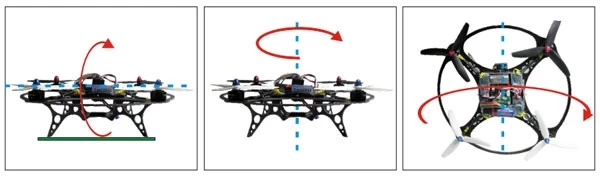
FunçãoFunção Bússola: função de bússola aberta, de 4 canais (centro do canal de direção), borboletas ao nível do solo, a atitude de vôo vai voltar para a direção atitude quando o poder sobre os Batterys.
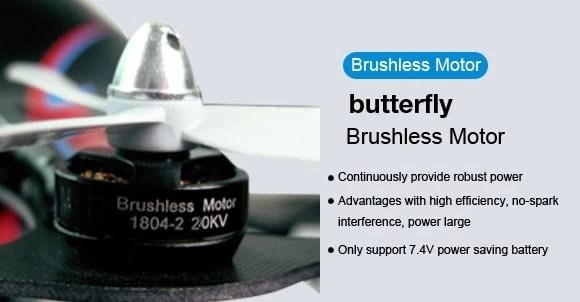
- 7.4V com suporte ou 11.1V lipo-bateria.
- Sem soldadura adicional
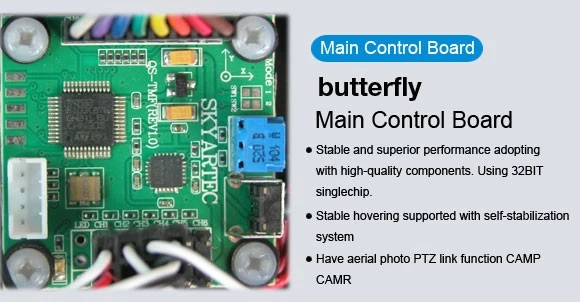
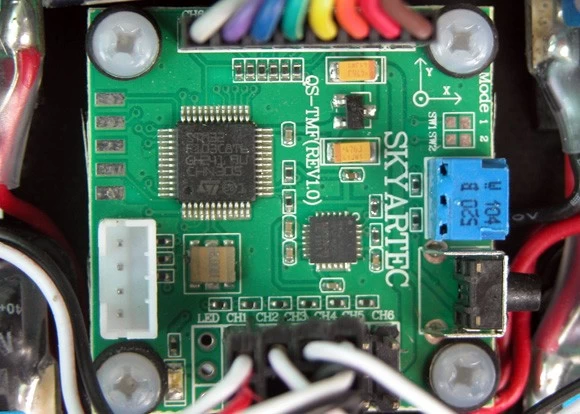
- Adota componentes de excelente qualidade, desempenho estável e superior. Use 32 bit singlechip
- Integração de todos os componentes, adota sensor de aceleração de três eixos e três eixos sensor de velocidade angular
(6 giroscópio eixo)
- Fácil de usar e depuração, aplica-se aos modelos multi-rotor múltiplas
- 3 Axia sensibilidade Gyro e definir a função principal pode ser ajustada pelo regulador de posição
- Suporte para multi-eixo tipo X
- Portas de saída ter até seis grupos, pode dirigir ESC ou servo.
- Saída de sinal PWM Padrão, apoiar ESC PWM convencional (sugiro usar Skyartec série de alta velocidade ESC) e todos os tipos de servo (digitais ou analógicas)
- O receptor pode ser conectado diretamente à placa de controle de voo, sem um decodificador especial, ou alterar
recebedor
- A versão existente pode conseguir pairar estável e excelente movimentação (depende de um mix razoável,
comissionamento e experiência operacional), o modo de funcionamento é semelhante ao helicóptero rc, mas mais fácil de se adaptar
- Pode completar algumas acrobacias incríveis habilidades do vôo, também pode a vida da bateria estável, para atender pequeno alcance aéreo
foto para substituir o complicado e caro helicóptero rc
- Suporte de atualização de firmware (precisa comprar de programação), e melhorando o desempenho incessante
- Sistema de auto-estabilização, suporte de ponto fixo pairando
- Pode eliminar rapidamente a inércia causada pelo vôo, rápido e estável.


Calibração da bússola
Por favor, calibração da bússola antes do primeiro vôo ou alterar um muito longe do local original.
Por favor, note: a precisão é ou menos 10 graus mais, o desvio é grande precisão, a bússola precisa ajustar.
1. colocar as borboletas na posição horizontal, travar o motor.
2. Mantenha tocar no botão no receptor até que o flash de luz, em seguida, solte o botão.
3. Gire o borboletas 360 graus de acordo com a frente / trás, orientação nível esquerda / direita e horizontal, e todos os gira são acabamento em 30 segundos, até que o receptor não está a piscar, as borboletas podem voar.